La totalité du système de déclenchement du télescope se situe à
l'intérieur de la caméra elle-même, juste derrière le plan focal du miroir [45].
A la
différence de toutes les autres expériences d'astronomie gamma,
les signaux provenant des photomultiplicateurs parcourent moins d'un
mètre avant d'être utilisés pour déclencher l'appareil. Ils ne subissent
ainsi pratiquement aucune dégradation "capacitive" suite à l'utilisation de
câbles.
Fondamentalement, la logique de déclenchement repose sur une coïncidence majoritaire entre les pixels de la caméra.
Il a néanmoins été imaginé une sectorisation de façon à réduire la
probabilité de déclenchement fortuit, à baisser l'acceptance aux hadrons (dont
les images sont plus "dispersées") et
à limiter l'acquisition d'événements inexploitables. La probabilité de
coïncidence aléatoire pour 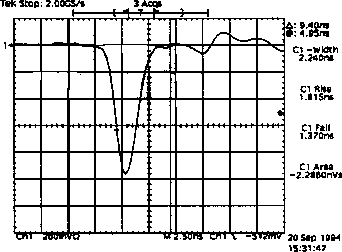 pixels touchés parmi
pixels touchés parmi ![]() pendant un temps
pendant un temps
![]() est donnée par:
est donnée par:
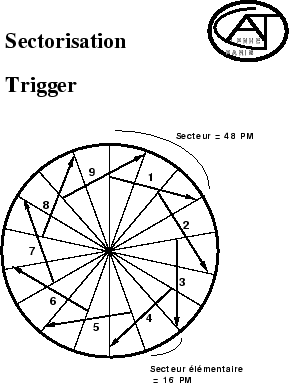
Il s'ensuit que tout groupe de photomultiplicateurs contenu dans un secteur angulaire de 48 photomultiplicateurs intérieurs adjacents peut déclencher l'acquisition s'il satisfait la condition de coïncidence. La figure 4.20 montre la logique de cette coïncidence. La structure "radiale" de cette géométrie est également reproduite au niveau électronique dans la disposition et le nombre de cartes utilisées pour éviter de rompre la symétrie du détecteur.
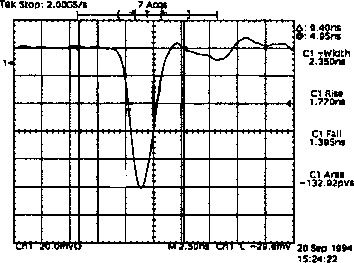
Afin de minimiser le temps de coïncidence, des comparateurs sont utilisés à la place de discriminateurs classiques. Ils présentent la caractéristique de permettre au signal logique généré lorsque le signal analogique dépasse le seuil choisi de ne pas avoir une largeur fixe mais dépendante de la largeur de ce dernier. Il s'ensuit que le synchronisme de la lumière Tcherenkov des gerbes gamma est ainsi pleinement exploité. Techniquement, une première somme sur 16 sorties de comparateurs est d'abord effectuée. De façon que le seuil puisse éventuellement être descendu jusqu'à 2 photoélectrons, le signal analogique des photomultiplicateurs est amplifié par un composant large-bande NEC1678 de gain 15. Ce dernier ne dégrade pratiquement pas le signal comme le montre la figure 4.21.
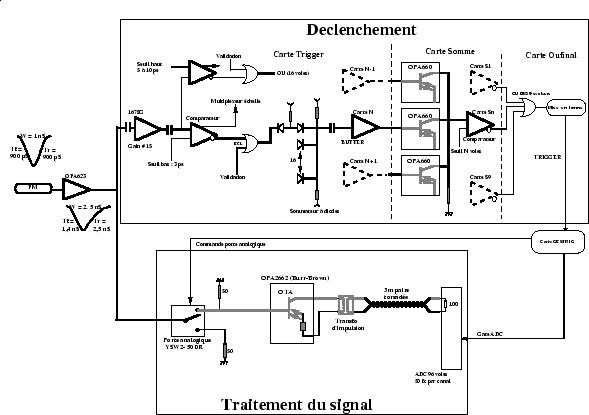
Un second étage produit la somme analogique des 3 sous-secteurs
correspondant à la somme partielle sus-mentionnée. De cette façon, 9
sommes sur 3 sous-secteurs sont obtenues. La coïncidence majoritaire (au moins
pixels parmi 48 au-dessus du seuil) est alors réalisée indépendamment
pour les 9 sommes par un discriminateur. Le déclenchement est mis en oeuvre
par une fonction logique OU entre tous les secteurs. La partie supérieure de
la figure 4.22 présente le sytème de déclenchement.
Chaque sortie de comparateur est également envoyée à un multiplexeur 8
canaux connecté à des échelles de comptage. Les modèles choisis sont des
CAEN V 560, 100 MHz.
Ces dernières permettent d'avoir
une première évaluation de l'évolution du bruit de fond de ciel dans les
pixels mais également de détecter la présence de l'image d'une étoile dans
un photomultiplicateur. Ce dernier point est important dans la mesure où il est
possible à un astre de magnitude moyenne de produire suffisamment de lumière
pour endommager les photomultiplicateurs.
L'image d'une telle source étant
quasi-ponctuelle, la surface du photomultiplicateur n'intervient pas et toute la
lumière collectée par le miroir est concentrée sur la photocathode en question.
Le nombre de photoélectrons induit peut s'écrire:
 est le diamètre du miroir,
est le diamètre du miroir,
 Hz.
Cette
valeur ne peut être directement obtenue par des considérations statistiques sur
la loi de Poisson suite à la présence d'after pulses précédemment
mentionnés.
Hz.
Cette
valeur ne peut être directement obtenue par des considérations statistiques sur
la loi de Poisson suite à la présence d'after pulses précédemment
mentionnés.
Lorsqu'un pixel est identifié comme étant soumis à la lumière d'une
étoile, sa haute tension est automatiquement baissée et il est
ignoré dans la logique de déclenchement.
La "densité" de composants électroniques et de câbles dans la caméra de
l'imageur étant considérable, la température doit être régulée. En
l'absence de système de refroidissement particulier, elle augmente à peu près quadratiquement
avec le temps et atteint plus de ![]() C en moins de quelques minutes. Un grand
nombre d'essais ont été effectués et il a été choisi de refroidir
l'ensemble du dispositif à l'aide d'une turbine d'extraction et de 16 petits
ventilateurs d'alimentation d'air. Des capteurs en différents points de la
caméra contrôlent la température locale et déclenchent une alarme si un
point dépasse 45
C en moins de quelques minutes. Un grand
nombre d'essais ont été effectués et il a été choisi de refroidir
l'ensemble du dispositif à l'aide d'une turbine d'extraction et de 16 petits
ventilateurs d'alimentation d'air. Des capteurs en différents points de la
caméra contrôlent la température locale et déclenchent une alarme si un
point dépasse 45![]() ou si l'écart entre deux capteurs
dépasse 15
ou si l'écart entre deux capteurs
dépasse 15![]() . Ne disposant pas de système de climatisation, cette
technique est d'autant plus efficace que la température extérieure est basse.
Elle n'a jamais empêché le fonctionnement normal durant les nuits
d'observation.
. Ne disposant pas de système de climatisation, cette
technique est d'autant plus efficace que la température extérieure est basse.
Elle n'a jamais empêché le fonctionnement normal durant les nuits
d'observation.