Trois caméras à transfert de charge (CCD), notées CCD1, CCD2 et CCD3 sont
fixées au support du miroir et utilisées pour évaluer les déformations
mécaniques et les corrections de pointé (cf figure 5.15). La caméra CCD1 repère la position
du détecteur plan focal (la caméra de photomultiplicateurs) par rapport au
référentiel de base du réflecteur grâce à l'utilisation de trois
photodiodes. La caméra CCD2, située proche du centre du miroir et dirigée
suivant son axe, et la caméra CCD3, placée à la périphérie du miroir,
avec un axe optique parallèle au précédent, produisent des images du champ stellaire
environnant la source observée. La comparaison des cartes établies par les
caméras CCD2 et CCD3 permet de vérifier que la déformation du support du
miroir reste compatible avec ce que l'on peut attendre de la modélisation par
éléments finis. La transformation qui fait coïncider le champ vu par la
caméra CCD2 avec celui vu par la caméra de photomultiplicateurs est déduite
d'acquisitions spécifiques avec un écran blanc placé dans le plan focal. L'image
obtenue ainsi que la position des trois photodiodes sont enregistrées par la
caméra CCD1 pour
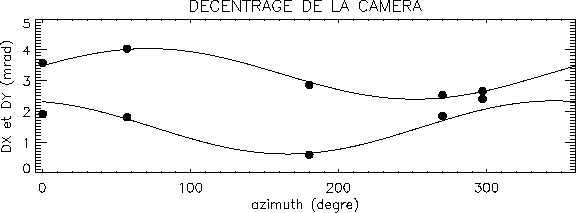
contrôler la position de la caméra de photomultiplicateurs. Ces mesures permettent
une paramétrisation de la situation exacte de l'axe optique dans le plan focal en
fonction
de l'azimut et du site de pointé, moyennant une modélisation de la flexion du
support de caméra et de l'erreur d'alignement des axes de rotation de la monture
alt-azimutale. A l'aide de ce modèle et des données des caméras CCD1 et CCD2
obtenues pendant les acquisitions physiques standard, la source peut être
localisée dans le champ de la caméra de photomultiplicateurs avec une
précision du même ordre que par la méthode précédente.
 |
Les résultats obtenus par cette démarche sont en accord avec ceux résultant de
l'utilisation des transits d'étoiles à 0.5 mrad près. C'est, à l'avenir,
l'évaluation par caméra CCD qui sera utilisée.