A rectangular parallepipede box. More...
#include <MathBrick.hxx>
Public Member Functions | |
Constructors | |
| MathBrick (double HalfX=0.01, double HalfY=0.01, double HalfZ=0.01, int Sign=- 1) | |
| Build a Brick of size (2*HalfX, 2*HalfY, 2*HalfZ) at origin (0, 0, 0). | |
| MathBrick (double *Origin, double *Ux, double *Uy, double *Uz, double HalfX=0.01, double HalfY=0.01, double HalfZ=0.01, int Sign=- 1) | |
| Build a Box of size (2*HalfX, 2*HalfY, 2*HalfZ) centered at Origin, with Ux, Uy, Uz, normal vectors to its faces. | |
| MathBrick (const char *Infinite, double HalfX=0.01, double HalfY=0.01, int Sign=- 1) | |
| Build a Box of size (2*HalfX, 2*HalfY) and of infinite height at origin (0, 0, 0). | |
| Shape_ptr | Clone (int count=0) override |
| Clone a Shape. | |
| void | Copy (Shape_ptr B) override |
| Copy all attributes of a Shape (but not attributes of the ancestor classes). | |
Shape parameters | |
| unsigned | IsBrick () override |
| double | GetHalfX () |
| double | GetHalfY () |
| double | GetHalfZ () |
| vector< double > | GetOrigin () |
| vector< double > | GetUx () |
| vector< double > | GetUy () |
| vector< double > | GetUz () |
| void | SetPeriodicBoundary (bool state=true, string TopBottPlaneBC="mirror") override |
| Periodic boundary (WARNING: only for MathBrick and MathHexagon). | |
Shape transformations | |
| void | Translate (double dx, double dy, double dz, int count=0) override |
| Translate the Shape by (dx, dy, dz). | |
| void | Rotate (double phi, double theta=0, double psi=0, double *center=nullptr, int count=0) override |
| Rotate the Shape clockwise. | |
Relations with other shapes | |
| unsigned | IsIncluded (Shape_ptr OtherShape) override |
| return 1 if the MathBrick is included in OtherShape otherwise 0 | |
| unsigned | IsDisjoint (Shape_ptr OtherShape) override |
| return 1 if the MathBrick is disjoint of OtherShape otherwise 0 | |
| bool | PointInShape (double *P, int border) override |
| True if the point P is in the Shape. | |
 Public Member Functions inherited from Shape Public Member Functions inherited from Shape | |
| Shape () | |
| Default constructor. The interior of a Shape is built. | |
| Shape (const Shape &s) | |
| Copy constructor. | |
| ~Shape () override | |
| Normal destructor. | |
| Shape_ptr | Not () |
| Return the complementary Shape (i.e. the other side) | |
| void | NewNot () |
| void | SetClone (Shape_ptr clone) |
| void | SetClone2Not () |
| Set the CloneShape to a Not. | |
| int | GetSign () |
| void | SetSign (int s) |
| void | SetOutermostShape (bool flag=true) |
| Say that this Shape is the most outer one. | |
| virtual unsigned | IsCylinder () |
| virtual unsigned | IsFullVoid () |
| virtual unsigned | IsHexagon () |
| virtual unsigned | IsNode () |
| virtual unsigned | IsPlane () |
| virtual unsigned | IsSphere () |
| virtual unsigned | IsTube () |
| virtual unsigned | IsFull () |
| virtual unsigned | IsVoid () |
| virtual unsigned | IsZTorus () |
| bool | IsInfinite () |
| virtual double | GetVolume () |
| Get the Volume of a Shape. | |
| void | SetVolume (double V) |
| virtual double | GetArea () |
| Get the Area of a Shape. | |
| void | SetArea (double S) |
| virtual void | SetMirrorBoundary (bool state=true) |
| mirror a particle on the surface | |
| virtual void | SetTopBottomPlanesOpen () |
| virtual bool | IsTopBottomPlanesOpen () |
| virtual void | SetSidePlanesOpen () |
| virtual bool | IsSidePlanesOpen () |
| virtual void | SetWhiteBoundary (bool state=true) |
| virtual bool | IsMirrorBoundary () |
| virtual bool | IsWhiteBoundary () |
| virtual bool | IsPeriodicBoundary () |
| virtual unsigned | Add (Shape_ptr OtherShape) |
| Add a new Shape (in fact a Shape_ptr) to a Node. | |
| virtual void | ReplaceLeaf (int i, Shape_ptr OtherShape) |
| unsigned | AddInsideShape (Shape_ptr OtherShape) |
| Add a Shape in fInsideShape each time a "put in" is done. | |
| unsigned | AddOriginalInsideShape (Shape_ptr OtherShape) |
| This method is called by Shape::AddInsideShape. | |
| void | ClearOriginalInsideShape () |
| void | ClearInsideShape () |
| unsigned | GetInsideShapeSize () |
| unsigned | GetOriginalInsideShapeSize () |
| void | SetInsideShape (int i, Shape_ptr S) |
| void | SetOriginalInsideShape (int i, Shape_ptr S) |
| Shape_ptr | GetInsideShape (int i) |
| Shape_ptr | GetOriginalInsideShape (int i) |
| virtual Shape_ptr | GetLeaf (int i) |
| virtual int | GetNumberOfLeaves () |
| string | GetShapeName () |
| returns the Shape name | |
| void | SetDebugName (string str) |
| string | GetDebugName () |
| virtual void | SetUniverse (int u=- 1) |
| Set the Universe number for a Shape . | |
| virtual void | SetFill (int f) |
| int | GetFill () |
| int | GetUniverse () |
| void | IncrementSurface (double S) |
| virtual void | RemoveSurface () |
| virtual string | Print () |
| virtual void | PrintX (int count=0) |
| Debug method: Print the shape surface when fMouvement=true. | |
| virtual void | PrintY (int count=0) |
| Debug method: Print the shape surfaces, InsideShape, ... | |
| virtual void | SetLinkedPlane (Shape_ptr P) |
| virtual void | ReplaceNode (Shape_ptr C) |
| Replace a Node by an other (C must be a Node) | |
| virtual SurfaceCard * | GetSurfaceCard () |
| virtual SurfaceCard * | GetSurfaceCard (int i) |
| virtual void | ResetIsDefinedSurfaceCalled () |
| virtual void | Simplify (bool violent=false) |
| Simplify a tree of Node. | |
| virtual void | SetMouvement (bool state=true) |
| virtual void | UnSetMouvement () |
| Set the fMouvement flag to false;. | |
| bool | GetMouvement () |
| virtual void | DevElague (int count=0, bool violent=false) |
| Developps and Trims a tree of Node. | |
| void | SetViolentSimplify (bool Allowed=true) |
| Enable/disable violent simplification a certain shapes to avoid "union" (for Serpent outside) | |
| void | SetFreezeSimplify (bool flag=true) |
| Enable/disable simplification a certain nodes to avoid "union" (for Serpent outside) | |
| bool | IsViolentSimplifyAllowed () |
| virtual int | GetMonoSurfaceType () |
| void | SetInfinite () |
| Public Member Functions inherited from TReference | |
| TReference () | |
| virtual | ~TReference ()=default |
| Destructor. | |
| void | AddReference (unsigned n=1) |
| unsigned | DelReference (unsigned n=1) |
| unsigned | Reference () |
Miscellaneous methods | |
| double | fHalfSize [3] |
| Half sizes of the brick. | |
| vector< double > | fOrigin |
| Origin of the brick. | |
| vector< double > | fUx |
| Normal vector to the 2 X planes. | |
| vector< double > | fUy |
| Normal vector to the 2 Y planes. | |
| vector< double > | fUz |
| Normal vector to the 2 Z planes. | |
| double | MinDistanceFrom2OppositeFace (vector< double > N, int whichplane, double *S) |
| void | CalculNot () override |
| Allocates and calculs the complement of a brick. | |
| int | NumberOfShapes () override |
| Number of shapes/surfaces this shape consists of. | |
| MathBrick (double HalfX, double HalfY, double HalfZ, int Sign, bool Infinite) | |
| Private constructor needed to copy a MathBrick in methods. | |
| MathBrick * | CreateNewInstance (int sign=1) override |
| a new MathBrick instance. | |
| void | Init (double HalfX, double HalfY, double HalfZ) |
| unsigned | CornerInBrick (MathBrick *brick, int all, int border) |
| Return 1 if corner(s) of this shape are in a brick. | |
| unsigned | CornerInCylinder (MathCylinder *cyl, int all, int border) |
| Return 1 if corner(s) of this shape are in a cylinder. | |
| double | Dist2Segment (MathCylinder *cyl, double Segment[6][2], double C0[6][2], int &segmentNum) |
| void | FindBrickProjection (MathCylinder *cyl, double Segment[6][2], double C0[6][2], double Origin[2]) |
| unsigned | GeneralIntersectionOf2Brick (MathBrick *brick) |
| return 1 if there is an intersection of the segment of this with the MathBrick brick | |
| unsigned | LineCrossPlane (double *X, vector< double > N, double *P, vector< double > U, double *D) |
| unsigned | CylinderCrossBrick (MathCylinder *Cyl) |
| unsigned | PointInSegment (double *X, double *A, double *B, int border) |
| unsigned | TwoFaces3Segments (MathBrick *brick, vector< double > N, int whichSize, double *C0, double C1[3][3]) |
| unsigned | TwoFaces2Segments (MathBrick *brick, vector< double > N, int whichSize, double *C0, double C1[2][3]) |
| double | GetVirtualSphereRadius () override |
| returns the radius of a Sphere containing the Shape | |
| double * | GetVirtualSphereCenter () override |
| returns the center of a Sphere containing the Shape | |
| double | MinDist1Point2Face (vector< double > U0, vector< double > U1, vector< double > U2, double *P0, double *S, int whichplane) |
| double | MinDist1Point2FaceInfinite (vector< double > U0, vector< double > U1, double *P0, double *S, int whichplane) |
Additional Inherited Members | |
| Protected Member Functions inherited from Shape | |
| virtual void | MinimumCopy (Shape *S) |
| Copy all attributs of a Shape S (but not attributs of the father classes). | |
| void | SetNot (Shape *aNot) |
| Allocates and calculs the complement of Shape. | |
| void | SetNotofNot () |
| Protected Attributes inherited from Shape | |
| vector< Shape_ptr > | fInsideShape |
| a vector to remember which Shapes are inside the current one.Clear at each ">>" | |
| vector< Shape_ptr > | fOriginalInsideShape |
| a vector to remember which Shapes are inside the current one. | |
| int | fSign |
| Define whether the interior (-1) or the exterior (+1) of the Shape is considered. | |
| bool | fInfinite |
| Determines whether the shape is infinite or not. | |
| Shape * | fNot |
| pointer on complementary Shape if exists, else 0. | |
| bool | fMouvement |
| Flag that indicate a Shape is in mouvement (translation, ..) in a tree. | |
| int | fUniverse |
| Universe number (for lattice filling) | |
| int | fFill |
| Universe number that fill the Shape. | |
| double | fVolume |
| the Volume of a Shape; | |
| double | fArea |
| the area of a Shape; | |
| string | fShapeName |
| Name of a Shape. | |
| string | fDebugName |
| Debug Name of a Shape. | |
| double | fVirtualSphereR |
| the radius of a Sphere containing the Shape | |
| double * | fVirtualSphereO |
| the center of a Sphere containing the Shape | |
| Shape_ptr | fCloneShape |
| the clone of a Shape | |
| bool | fMirrorBoundary |
| whether or not mirror a particle on the surface | |
| bool | fOpenZPlanes |
| whether the top/bottom planes are not mirrors (default=false) | |
| bool | fOpenXYPlanes |
| whether the side planes are not mirrors (default=false) | |
| bool | fWhiteBoundary |
| whether or not mirror a particle on the surface with a cosine distribution | |
| bool | fPeriodicBoundary |
| whether or not Periodic boundary are applied (only for plane) | |
| string | fTopBottPlaneBoundaryCondition |
| whether the top(bottom) plane of a periodic boundary Shape is white or mirror | |
| Shape_ptr | fLinkedPlane |
| the Plane linked to an this for periodic boundary | |
| bool | fIsViolentSimplifyAllowed |
| whether or not a "violent simplification is allowed (ie a Node or a Brick are allowed to be separated) | |
| bool | fOutermostShape |
| whether or not this Shape is the limit to the exterior world (for calculating particle losses). | |
| bool | fFreezeSimplify |
| disable any Node simplification (for serpent in ReactorAssembly) | |
Detailed Description
A rectangular parallepipede box.
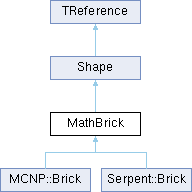
A MathBrick is a rectangular parallepipede defined by half width, half length, half height (HalfX, HalfY, HalfZ). It is only a mathematical shape (no link to any code output). User should use Brick (from MCNP or Serpent namespace).
Sign=-1 for Brick interior and Sign=+1 for its exterior.
Default: interior of a 0.01*0.01*0.01 cube, perpendicular to (x, y, z) basis and center at origin.
- Version
- 2.0
Constructor & Destructor Documentation
◆ MathBrick() [1/4]
| MathBrick::MathBrick | ( | double | HalfX = 0.01, |
| double | HalfY = 0.01, |
||
| double | HalfZ = 0.01, |
||
| int | Sign = - 1 |
||
| ) |
Build a Brick of size (2*HalfX, 2*HalfY, 2*HalfZ) at origin (0, 0, 0).
Default: Cube center at origin of 0.01*0.01*0.01 = 1 cm3
- Parameters
-
HalfX : half of X-dimension of the brick HalfY : half of Y-dimension of the brick HalfZ : half of Z-dimension of the brick Sign : -1 (default) for interior and +1 for exterior
◆ MathBrick() [2/4]
| MathBrick::MathBrick | ( | double * | Origin, |
| double * | Ux, | ||
| double * | Uy, | ||
| double * | Uz, | ||
| double | HalfX = 0.01, |
||
| double | HalfY = 0.01, |
||
| double | HalfZ = 0.01, |
||
| int | Sign = - 1 |
||
| ) |
Build a Box of size (2*HalfX, 2*HalfY, 2*HalfZ) centered at Origin, with Ux, Uy, Uz, normal vectors to its faces.
Default: Cube of 0.01*0.01*0.01 = 1 cm3
- Parameters
-
Origin : Center point of the brick (double[3]) Ux : normal vector of face normally perpendicular to x-axis (double[3]) Uy : normal vector of face normally perpendicular to y-axis (double[3]) Uz : normal vector of face normally perpendicular to z-axis (double[3]) HalfX : half of X-dimension of the brick HalfY : half of Y-dimension of the brick HalfZ : half of Z-dimension of the brick Sign : -1 (default) for interior and +1 for exterior
◆ MathBrick() [3/4]
| MathBrick::MathBrick | ( | const char * | Infinite, |
| double | HalfX = 0.01, |
||
| double | HalfY = 0.01, |
||
| int | Sign = - 1 |
||
| ) |
Build a Box of size (2*HalfX, 2*HalfY) and of infinite height at origin (0, 0, 0).
Default: Cube center at origin of 0.01*0.01 = 1 cm2 rectangular basis
- Parameters
-
Infinite : any string between "" (for resolution of overload) HalfX : half of X-dimension of the brick HalfY : half of Y-dimension of the brick Sign : -1 (default) for interior and +1 for exterior
◆ MathBrick() [4/4]
|
protected |
Private constructor needed to copy a MathBrick in methods.
Member Function Documentation
◆ CalculNot()
|
overridevirtual |
Allocates and calculs the complement of a brick.
Reimplemented from Shape.
◆ Clone()
◆ Copy()
|
overridevirtual |
◆ CornerInBrick()
|
protected |
Return 1 if corner(s) of this shape are in a brick.
- Parameters
-
all : Ask about all (all=1) or at least one (all=0) corner of this shape. border : Resolve border: if a corner of this shape is at the surface of brick, it is considered inside (-1) or outside (+1)brick : The brick which we try to fit in.
◆ CornerInCylinder()
|
protected |
Return 1 if corner(s) of this shape are in a cylinder.
- Parameters
-
all : Ask about all (all=1) or at least one (all=0) corner of this shape. border : Resolve border: if a corner of this shape is at the surface of cyl, it is considered inside (-1) or outside (+1)cyl : The cylinder which we try to fit in.
◆ CreateNewInstance()
|
overrideprotectedvirtual |
◆ CylinderCrossBrick()
|
protected |
Return 1 if a cylinder and a brick cut together. Find (if exist) the cross-point of the axis cylinder with on brick face.
- Parameters
-
Cyl : The cylinder
◆ Dist2Segment()
|
protected |
◆ FindBrickProjection()
|
protected |
Projection of a brick in a plane perpendicular to the cylinder axis. THIS METHOD IS NO MORE USED BECAUSE IT GIVES WRONG ANWSER (how to join the hexagon corners?)
- Parameters
-
cyl : cylinder Segment : the segments of the result hexagon of the projection (2D); they are order in such way that C0[i] is linked to C0[i+1] C0 : the corners of the result hexagon of the projection (2D) Origin : origin
◆ GeneralIntersectionOf2Brick()
|
protected |
return 1 if there is an intersection of the segment of this with the MathBrick brick
◆ GetHalfX()
|
inline |
< return the half width
◆ GetHalfY()
|
inline |
< return the half length
◆ GetHalfZ()
|
inline |
< return the half height (if it exists)
◆ GetOrigin()
|
inline |
< return the origin
◆ GetUx()
|
inline |
< return the 3 components of normal vector to the 2 X planes
◆ GetUy()
|
inline |
< return the 3 components of normal vector to the 2 Y planes
◆ GetUz()
|
inline |
< return the 3 components of normal vector to the 2 Z planes (or the axis vector if infinite)
◆ GetVirtualSphereCenter()
|
overrideprotectedvirtual |
◆ GetVirtualSphereRadius()
|
overrideprotectedvirtual |
◆ Init()
|
protected |
Set half sizes, origin, and normal vectors, needed by constructors
◆ IsBrick()
|
inlineoverridevirtual |
◆ IsDisjoint()
|
overridevirtual |
◆ IsIncluded()
|
overridevirtual |
◆ LineCrossPlane()
|
protected |
Find the intersection of a plane and a line. 0=no intersection, 1=at least 1 intesection.
- Parameters
-
P : a point of the plane N : the normal vector of the plane D : a point of the line U : a vector of the line X : (output) the intersection point if exists
◆ MinDist1Point2Face()
|
protected |
Calculates the minimum distance from point S to faces of normal vector U0 and center P0
- Parameters
-
U1 : the other faces, in x->y->z->x order U2 : the other faces, in x->y->z->x order S : point P0 : center U0 : normal vector whichplane : indicates which plane is considered (for fHalfSize)
◆ MinDist1Point2FaceInfinite()
|
protected |
Calculates the minimum distance from point S to face of normal vector U0 and center P0, in case of infinite brick
- Parameters
-
S : point P0 : center U0 : normal vector U1 : the other face whichplane : indicates which plane is considered (for fHalfSize)
◆ MinDistanceFrom2OppositeFace()
| double MathBrick::MinDistanceFrom2OppositeFace | ( | vector< double > | N, |
| int | whichplane, | ||
| double * | S | ||
| ) |
return the minimum distance of 2 opposite faces of a brick to the point S.
- Parameters
-
N : normal vector defining the 2 surfaces (either fUx, fUy or fUz). whichplane : used to know if N is fUx, fUy or fUz S : The point
◆ NumberOfShapes()
|
inlineoverridevirtual |
Number of shapes/surfaces this shape consists of.
Reimplemented from Shape.
◆ PointInSegment()
|
protected |
returns 1 if the point X is in (A, B) otherwise 0.
- Parameters
-
X : point A : point B : point border : -1 => X is in [A, B], +1 => X is in ]A, B[
◆ PointInShape()
|
overridevirtual |
◆ Rotate()
|
overridevirtual |
◆ SetPeriodicBoundary()
|
overridevirtual |
Periodic boundary (WARNING: only for MathBrick and MathHexagon).
Please read carefully the MCNP user guide before using these conditions.
- Parameters
-
state : true or false to allow periodic condition TopBottPlaneBC : The Top/Bottom planes of the MathBrick or MathHexagon boundary conditions ; Possible values are - TopBottPlaneBC="mirror" : The Top/Bottom planes are reflecting surfaces (Default)
- TopBottPlaneBC="white" : The Top/Bottom planes are white boundaries
- TopBottPlaneBC="infinite" : The Top/Bottom planes are infinite (not yet implemented)
Reimplemented from Shape.
◆ Translate()
|
overridevirtual |
◆ TwoFaces2Segments()
|
protected |
return 1 if there is an intersection of 2 segments of a Brick's rectangular basis with at least one of 2 opposite face of an other MathBrick.
◆ TwoFaces3Segments()
|
protected |
return 1 if there is an intersection of 3 segments of a Brick with at least one of 2 opposite face of an other Brick.
Member Data Documentation
◆ fHalfSize
|
protected |
Half sizes of the brick.
◆ fOrigin
|
protected |
Origin of the brick.
◆ fUx
|
protected |
Normal vector to the 2 X planes.
◆ fUy
|
protected |
Normal vector to the 2 Y planes.
◆ fUz
|
protected |
Normal vector to the 2 Z planes.
The documentation for this class was generated from the following files:
- /gpr/meplan/SMURE/source/include/MathBrick.hxx
- /gpr/meplan/SMURE/source/src/MathBrick.cxx